
ITI G. Fauser, Novara – Manipolazione oggetti tramite algoritmo di riconoscimento delle forme
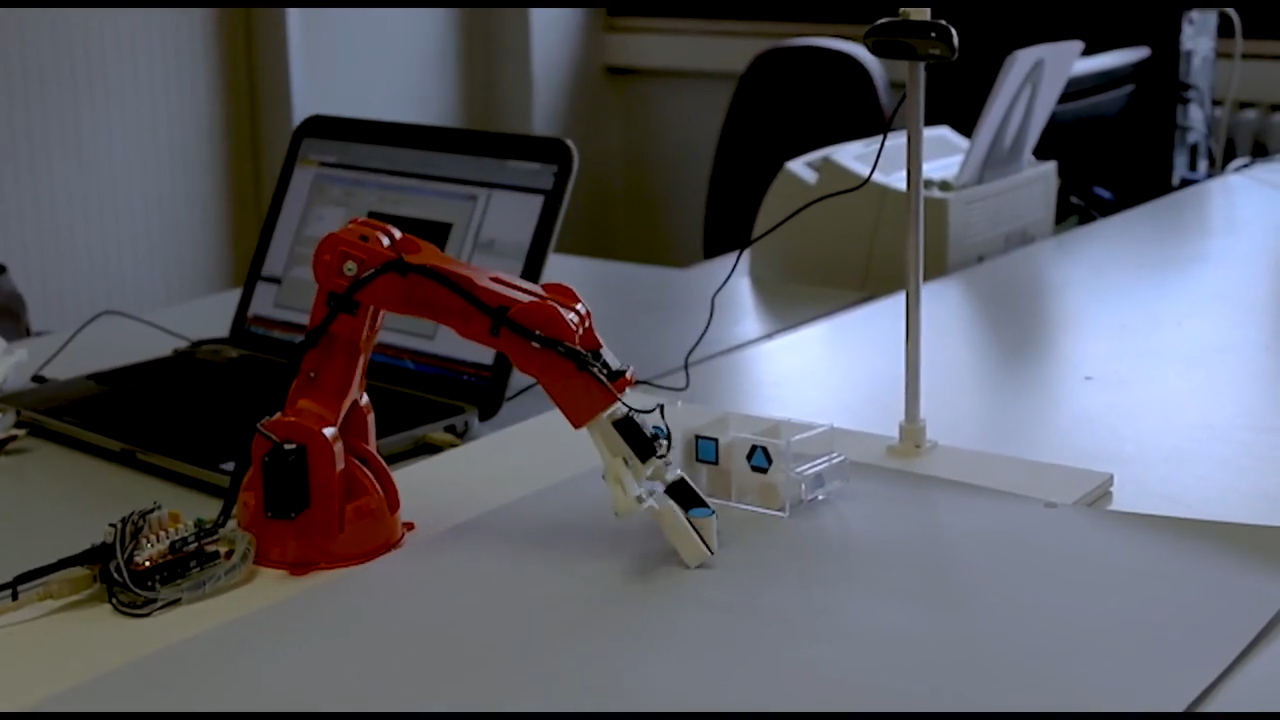
Il progetto, che ha coinvolto gli studenti delle classi 5CIN, 5AIN e 5BIN dell’indirizzo informatica ,prevede lo sviluppo di un sistema di manipolazione di oggetti tramite un braccio robotico attraverso un algoritmo di visione artificiale . Il sistema analizza il flusso video proveniente da una webcam per riconoscere piccoli oggetti disposti casualmente per determinarne la posizione in un piano di riferimento cartesiano bidimensionale. Successivamente, viene calcolata una sequenza di movimenti che permette a un braccio robotico di prelevare ciascun oggetto e collocarlo in contenitori diversi a seconda delle caratteristiche geometriche dell’oggetto stesso. L’intero processo simula una operazione di pick and place frequentemente utilizzata in ambito industriale per selezionare prodotti di tipologia diversa per il successivo assemblaggio o confezionamento.
Il progetto si è aggiudicato il terzo premio nella categoria “Robotica” del concorso SI_Fabbrica del valore di 3.000 € che verrà donato all’Istituto sotto forma di nuova strumentazione e ulteriori opportunità formative utili alla prosecuzione del percorso di sostegno e di aggiornamento dei laboratori didattici dell’Istituto.
Il TEAM
DOCENTI
Alessandro De Rose
STUDENTI
Mattia Cervo, Nicholas Gregori, Davide Mor, William Nobili, Domenico Popolizio





{kind=link}